Biến tần, bộ chuyển đổi Switched-mode power supply (SMPS), bộ điều khiển tốc độ, … đều có điểm chung: Là bao gồm nhiều công tắc điện tử, các công tắc này là các thiết bị điện tử công suất như MOSFET, insulated-gate bipolar transistor (IGBT), TRIAC v.v …
Trong bài viết này, mời các bạn cùng Bachkhoatech tìm hiểu:
- PWM là gì?
- Cách điều khiển tốc độ động cơ một chiều bằng PWM?
- Cuối cùng là một số vi dụ về điều khiển động cơ một chiều sử dụng: 8051, arduino.
PWM là một loại tín hiệu ở dạng một xung đơn, sóng vuông. Tức là, tín hiệu xung PWM sẽ ở hai mức cao hoặc thấp. Ví dụ, chúng ta hãy xem xét tín hiệu 5V PWM, trong trường hợp này tín hiệu PWM là 5V (cao) hoặc nối đất 0V (thấp).

Điều chế độ rộng xung PWM là phương pháp điều chỉnh điện áp đầu ra, theo sự thay đổi độ rộng xung vuông. Khiến điện áp thay đổi. Xung PWM được chuyển đổi có cùng một tần số và chỉ khác nhau về độ rộng của mặt dương. Phương pháp PWM chủ yếu được sử dụng cho các ứng dụng điều khiển động cơ một chiều motor DC. Phương pháp này giúp điều chỉnh tốc độ động cơ và ổn định tốc độ động cơ. Khác với các động cơ điện xoay chiều hay động cơ AC. Điều khiển tốc độ bằng phương pháp thay đổi tần số nguồn điện cấp. Thông thường trong công nghiệp sử dụng các bộ biến tần.
Điều khiển tốc độ động cơ một chiều bằng PWM, là phương pháp điều chế độ rông xung PWM, để thay đổi giá trị điện áp trung bình. Cung cấp điện áp cho động cơ, được kiểm soát bằng cách thay đổi việc đóng cắt giữa nguồn và động cơ với một tốc độ rất nhanh (tần số xung cỡ khoảng một vài kHZ). Các bạn xem video dưới đây, để hiểu kỹ hơn.
Như vậy, giá trị điện áp mà chúng ta đo được từ 0-12V (xem hình bên dưới) chính là giá trị điện áp trung bình Utb (theo công thức 1). Bằng cách thay đổi thời gian ON-OFF trong một chu kỳ mà ta có giá trị điện áp trung bình khác nhau .
Vậy, điều khiển tốc độ động cơ một chiều bằng PWM, là phương pháp: Thay vì điều khiển điện áp liên tục, ta điều khiển điện áp bằng các xung có tần số cố định, nhưng có độ rộng xung thay đổi. Khi đó giá trị trung bình điện áp cũng thay đổi, để điều khiển được tốc độ động cơ một chiều.

Ta có công thức tính điện áp trung bình:
Utb=Uđm*Thi/T (công thức 1)
Trong đó:
Phương pháp điều chế độ rộng xung PWM để điều khiển tốc độ động cơ một chiều (DC motor). Vi dụ: Dùng vi điều khiển IC 89C51 (thộc dòng vi điều khiển 8051) để điều khiển (xem sơ đồ nguyên lý bên dưới).
Đối tượng điều khiển là động cơ điện một chiều (DC motor), với đầu vào là điện áp đặt vào phần ứng, tín hiệu ra là góc quay và vận tốc quay trên trục động cơ. Kích từ cho động cơ là kích từ độc lập (nam châm vĩnh cữu) có từ thông =const.
Các thông số động cơ:

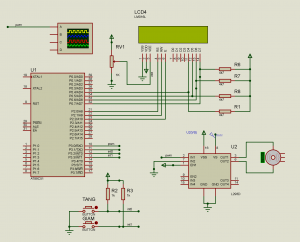
(Sơ đồ nguyên lý điều khiển tốc độ động cơ một chiều bằng PWM, dùng vi điều khiển 89C51)
int dem=0;
int phantramxung=50; //do rong xung de mac dinh = 50%
//Ham phuc vu ngat ngoai 0
void ngat_int0(void) interrupt 0
{
if(phantramxung<100) phantramxung+=5;
}
//Ham phuc vu ngat ngoai 1
void ngat_int1(void) interrupt 2
{
if(phantramxung>0) phantramxung-=5;
}
//Ham phuc vu ngat timer 0
void ngat_t0(void) interrupt 1
{
dem++;
if(dem<phantramxung) PWM=1;//P3_0=1
else
{
PWM=0;//P3_0=0
if(dem==100) dem=0;
}
TR0=1;//Khoi dong lai timer 0
}
/*====== Ham chinh ==========*/
void main(){
//Khai bao ngat INT0
EX0=1;//Cho phep ngat ngoai 0
IT0=1;//Cho phep ngat theo suon am
//Khai bao ngat INT1
EX1=1;//Cho phep ngat ngoai 0
IT1=1;//Cho phep ngat theo suon am
//Khai bao ngat timer 0
TMOD=0x02;//0000 0020: Che do 2, 8 bit, tu dong
TH0=0xCE;//Ngat 50us
TR0=1; //Start timer 0
//Cho phep ngat toan cuc
EA=1;
while(1)
{
if(P1_0==0) on=1; //bat dong co
else
on=0; //tat dong co
if (P1_7==0) thuan=1;//DK dong co theo chieu thuan
else
thuan=0; //Dao chieu dong co
}
}
| VD1 | VD 2 | VD 3 | VD 4 | VD 5 | VD 6 | VD 7 | VD 8 |
| Dùng Timer0 | Dùng Timer1 | Dùng Timer0 | Dùng Timer1 | Dùng Timer0 | Dùng Timer1 | Dùng Timer0 | Dùng Timer1 |
| Trễ 500us | Trễ 1500us | Trễ 2000us | Trễ 2500us | Trễ 3000us | Trễ 3500us | Trễ 4500us | Trễ 5000us |
Liên hệ với chúng tôi để được giải đáp các thắc mắc!
Trận trọng!
By Bachkhoatech!

Loadcell – 5 Loại Loadcell Phổ Biến Nhất Loadcell là gì? Loadcell cân điện tử nào phù hợp cho cân bồn, cân sàn hay cân xe tải? Khi tìm mua loadcell công nghiệp, nhiều người thường băn khoăn giữa hàng loạt lựa chọn như loadcell chống rung, loadcell chữ S, loadcell nén hay loadcell thanh. […]

Đầu Cân XK3101K – Cài Đặt XK3101K Từ A – Z Bạn vừa mua đầu cân XK3101K nhưng chưa biết cách cấu hình ra sao? Từ việc đấu nối loadcell, thiết lập thông số hiển thị, truyền thông RS232/RS485 cho đến hiệu chuẩn chuẩn xác… tất cả sẽ được hướng dẫn chi tiết trong bài […]

Bạn đang tìm kiếm dây chuyền sản xuất tự động để tối ưu hóa quy trình? Bạn cần máy đóng bao tự động, máy chiết rót, máy sấy vải, máy cắt dây, máy trộn bê tông tự động, hoặc máy bắn keo, máy dán nhãn, lập trình cho công đoạn sản xuất cụ thể? BachKhoaTech […]

Hướng dẫn sinh viên thực hiện đồ án môn học “Thiết kế hệ thống điều khiển và tự động hóa 2023”. Phần 1: Đăng ký chon đề tài Click nào nút “Đăng ký” bên dưới đây! Sau khi sinh viên đã đăng ký xong (lưu ý mỗi nhóm không quá 5 sinh viên ). Bước […]

HỌC LẬP TRÌNH S7-300 QUA MỘT SỐ VÍ DỤ Mục tiêu: Giới thiệu chi tiết các bước xây dựng, thiết kế và lập trình các hệ thống điều khiển tự động bằng PLC S7-300 của hãng Siemens Đức, các bạn xem và thực hành lại trên máy tính của minh. Để dẽ dàng hơn các […]

Hướng dẫn nộp bài tập lớn Nộp bài tập môn Vi xử lý trong đo lường và điều khiển Thời gian hết ngày 15/08/2022!! Các có nhiều file báo cáo thì cho vào một thư mục (Folder) tên theo định dạng như sau: Tênsv_mssv, nén thư mục này thành file rar Rồi gửi file *.rar […]

Mục tiêu: Sau khi học xong ngôn ngữ lập trình C và C++, các bạn sẽ nắm được phương pháp lập trình cấu trúc và hướng đối tượng. Các bước giải bài toán trên máy tính. Các khái niệm về biến, hằng, toán tử, biểu thức, câu lệnh, cấu trúc rẽ nhánh, cấu trúc lặp, […]
Hướng dẫn kiểm tra online thực hiện theo các bước (1,2,3) trong Phần 1 dưới đây và nộp bài tập lớn ở Phần 2 ở cuối của bài viết này! Phần 1: Các bước thực hiện kiêm tra online Bước 1: Sinh viên đăng ký kiểm tra, để nhận đề tại link bên dưới! Click […]

Việt nam đang trên đà phát triển hội nhập kinh tế toàn cầu, vấn đề đào tạo nguồn nhân lực chất lượng cao hiện nay đặc biệt là trong ngành điều khiển tự động hóa là rào cản lớn khiến cho chúng ta chưa thực sự có bước tiến đột phá. Vậy những bất cập […]

Tủ bảng điện được lắp ráp nhiều trong các nhà máy, xí nghiệp, và công trình dân dụng. Với mỗi một mục đích khác nhau, điều khiển hay vận hành, kỹ thuật viên thiết kế các thiết bị điện phù hợp với chức năng của tủ điện. Bài viết này mình đi tìm hiểu thêm […]

Hệ Thống Xếp Bao Lên Pallet Tự Động Kết Hợp Cân và Đong Bao Tự Động: Giải Pháp Tối Ưu Cho Quy Trình Sản Xuất Mới Nhất 2025 Trong bối cảnh công nghiệp hiện đại, việc tối ưu hóa quy trình sản xuất và vận hành dây chuyền là vô cùng quan trọng. Hệ thống […]

Các hệ thống như cân định lượng, cân trộn tự động, cân đóng bao, cân phối liệu, cân phối trộn, trạm trộn bê tông, hay hệ thống trộn xi măng tự động đều có một điểm chung cốt lõi: chúng được thiết kế nhằm mục tiêu đo lường chính xác khối lượng nguyên liệu (thông […]

Bài viết về Thiết Kế và Xây Dựng Hệ Thống Tưới Tự Động Cho Nhà Lưới là một nghiên cứu độc đáo trong lĩnh vực tự động hóa nông nghiệp. Nhận biết những thách thức trong nông nghiệp hiện đại và đánh giá nhu cầu tưới tiêu, bài viết tập trung vào cải thiện hiệu […]

Với yêu cầu giữ nguyên mùi vị, màu sắc, và thành phần hàm lượng dinh dưỡng. Ngày nay máy sấy lạnh được áp dụng rộng rãi trên thị trường để phục vụ nhu cầu sấy thực phẩm, nông sản, hoa quả vv. Vậy máy sấy lạnh thế hệ mới có ưu điểm gì so với […]
Hệ Thống Xếp Bao Lên Pallet Tự Động Kết Hợp Cân và Đong Bao Tự Động: Giải Pháp Tối Ưu Cho Quy Trình Sản Xuất Mới Nhất 2025 Trong bối cảnh công nghiệp hiện đại, việc tối ưu hóa quy trình sản xuất và vận hành dây chuyền là vô cùng quan trọng. Hệ thống […]
Các hệ thống như cân định lượng, cân trộn tự động, cân đóng bao, cân phối liệu, cân phối trộn, trạm trộn bê tông, hay hệ thống trộn xi măng tự động đều có một điểm chung cốt lõi: chúng được thiết kế nhằm mục tiêu đo lường chính xác khối lượng nguyên liệu (thông […]
Bài viết về Thiết Kế và Xây Dựng Hệ Thống Tưới Tự Động Cho Nhà Lưới là một nghiên cứu độc đáo trong lĩnh vực tự động hóa nông nghiệp. Nhận biết những thách thức trong nông nghiệp hiện đại và đánh giá nhu cầu tưới tiêu, bài viết tập trung vào cải thiện hiệu […]
Với yêu cầu giữ nguyên mùi vị, màu sắc, và thành phần hàm lượng dinh dưỡng. Ngày nay máy sấy lạnh được áp dụng rộng rãi trên thị trường để phục vụ nhu cầu sấy thực phẩm, nông sản, hoa quả vv. Vậy máy sấy lạnh thế hệ mới có ưu điểm gì so với […]

